DESIGN MORPHOLOGY
设计形态学
月球车设计 / 设计形态学 / 航空航天 / 工业设计


清华大学载人月球车备选设计方案
一、备选方案之“探月骋足”月球车
月球是人类探索太空的第一站,也是未来建立太空基地的重要目标。为了更好地了解月球的地质结构和环境条件,我们需要在月球表面进行科学探索和采样。然而,月球的环境非常恶劣,低重力、高辐射、极端温度变化和崎岖地形等因素都给月球车的设计带来了巨大的挑战。为了解决这些问题,我们设计了一款六足机器人作为月球车,它具有稳定、灵活、高效和安全等特点,可以在月球表面自由行走和工作。下面我们将介绍这款六足月球车的设计细节。
1. 结构设计
我们选择了六足设计作为月球车的基本结构,因为六足设计可以提供稳定的支撑,使机器人在崎岖的月球地形上行走时保持平衡。每个腿部都配备有关节和马达,可以独立控制,以适应各种地形。足部是仿生造型,能够提高稳定性和移动效率,并且可以更换为探测工具。这种设计使得机器人在遇到复杂地形时,可以通过调整腿部的姿态和位置来保持稳定。下图是我们的六足月球车的示意图。
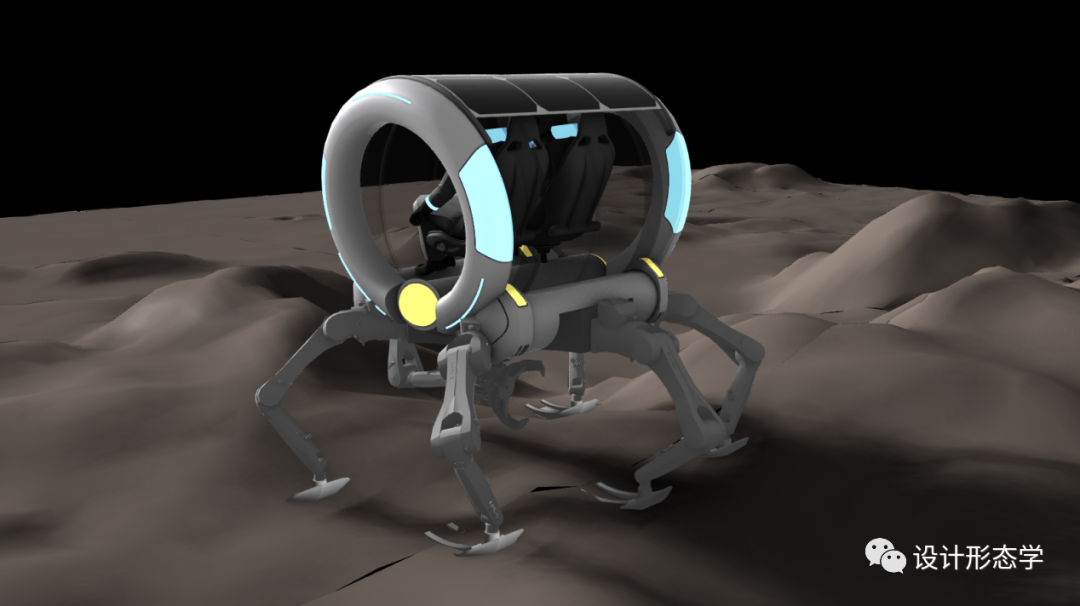
“探月骋足”月球车设计方案
考虑到月球的极端环境,机器人的材料需要具有抗辐射、耐高温、耐低温和轻质等特性。因此,我们选择了钛合金和高强度塑料作为主要材料。这些材料不仅能够抵抗恶劣环境的侵蚀,而且重量轻,可以减少能源消耗。
2. 座舱设计
我们为机器人设计了一个圆筒形座舱,用于容纳宇航员和科学仪器。座舱采用圆筒形设计,座位可以360度转动,这样无论月球车在何种姿态下,宇航员都能方便地进出座舱。这种设计使得宇航员在任何情况下都能快速安全地进出座舱。
座舱的入口设计为宽大的侧门,方便宇航员上下车。门的开关机制采用电动马达驱动,操作简单。这样即使在紧急情况下,宇航员也能迅速离开座舱。
座舱的顶棚是太阳能板,可以利用月球的阳光进行充电。这种设计使得月球车在日间可以利用太阳能进行充电,从而延长其工作时间。下图是我们的座舱设计的示意图。
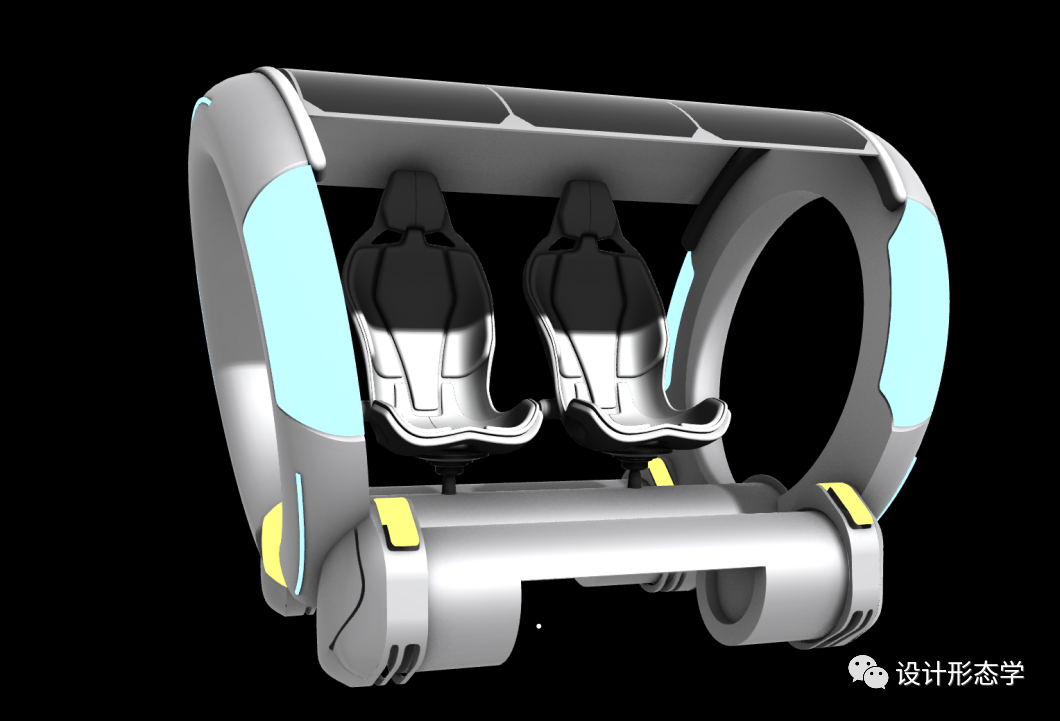
“探月骋足”月球车座舱设计方案
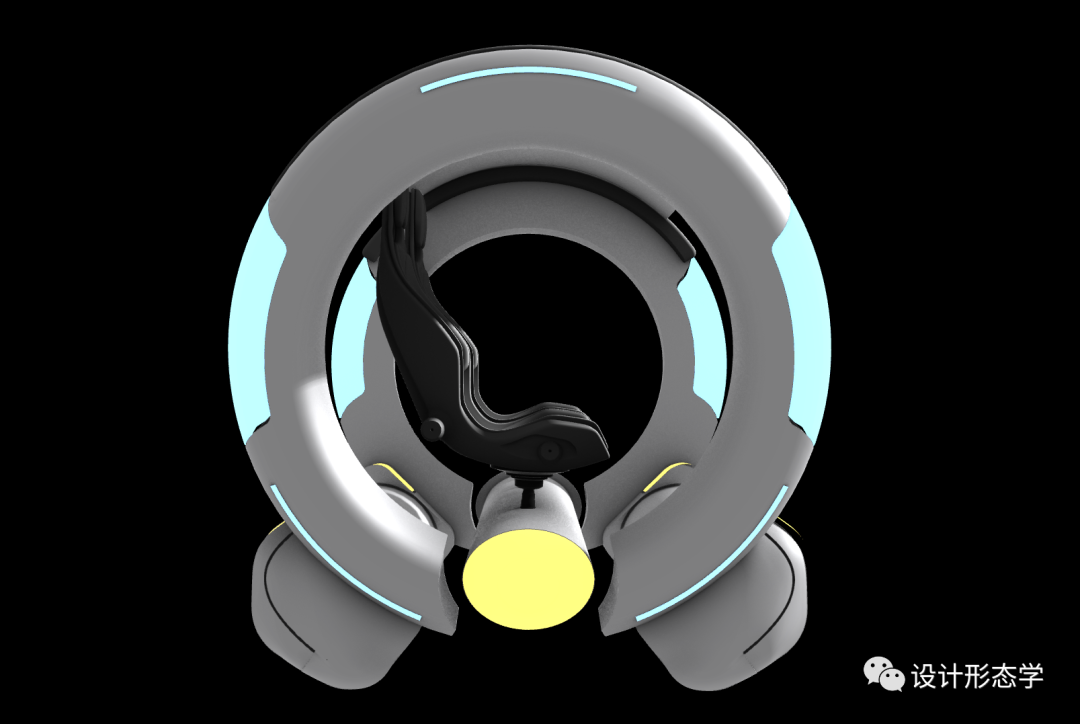
“探月骋足”月球车座舱设计方案-侧视图
3. 功能设计
我们为机器人配备了各种科学仪器,用于进行地质勘探和样本采集。这些设备包括但不限于摄像头、光谱仪、地质钻头等,可以帮助我们更深入地了解月球的地质结构和环境条件。
我们为机器人装备了高频率通信设备,可以将数据实时传输回地球。这样我们就可以实时获取月球车的工作状态和科学数据。我们为机器人选择了核电池作为主要能源,以保证机器人在任何环境下都能正常工作。核电池具有长寿命和高能量密度的特点,非常适合在恶劣环境中使用。
4. 控制系统
我们为机器人设计了一个智能的控制系统,可以实现自主导航和遥控操作两种模式。自主导航模式下,机器人具有自主导航能力,可以规划路径以避开障碍物。这种能力使得机器人在遇到复杂地形时,可以自主决定最佳行走路径。遥控操作模式下,机器人可以通过地面控制中心进行遥控操作。这样我们就可以根据实际需要,对月球车进行精确控制。
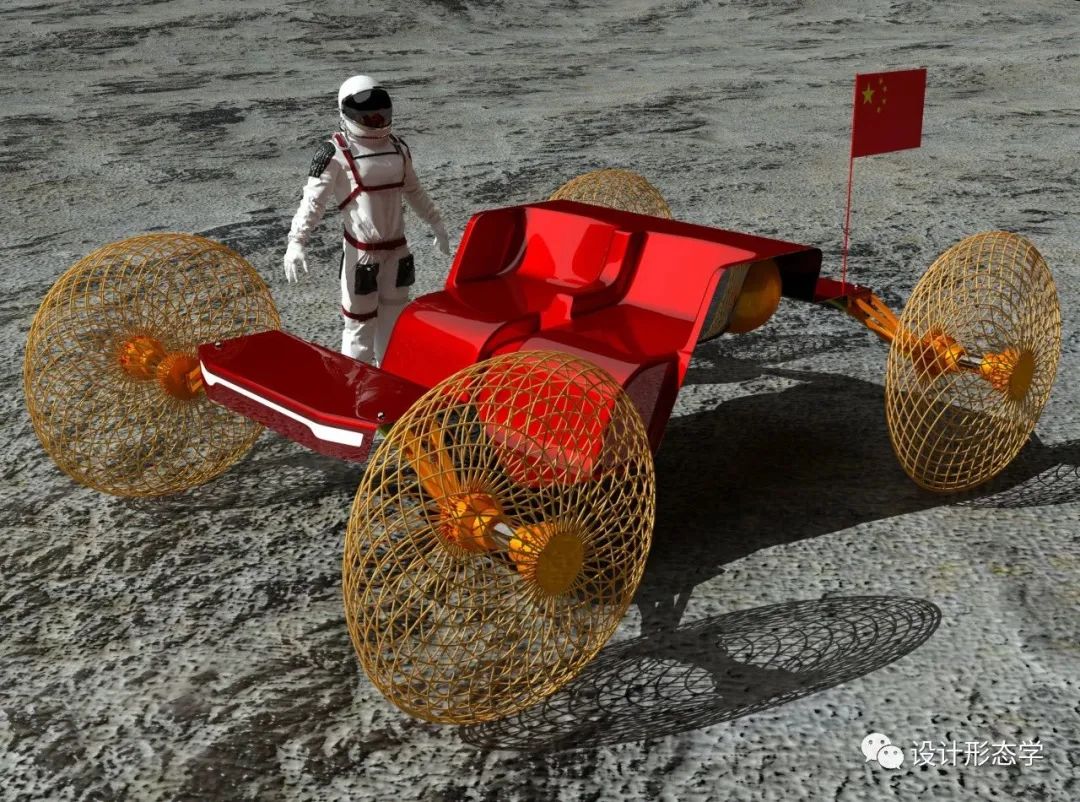
二、备选方案之“哪吒”月球车
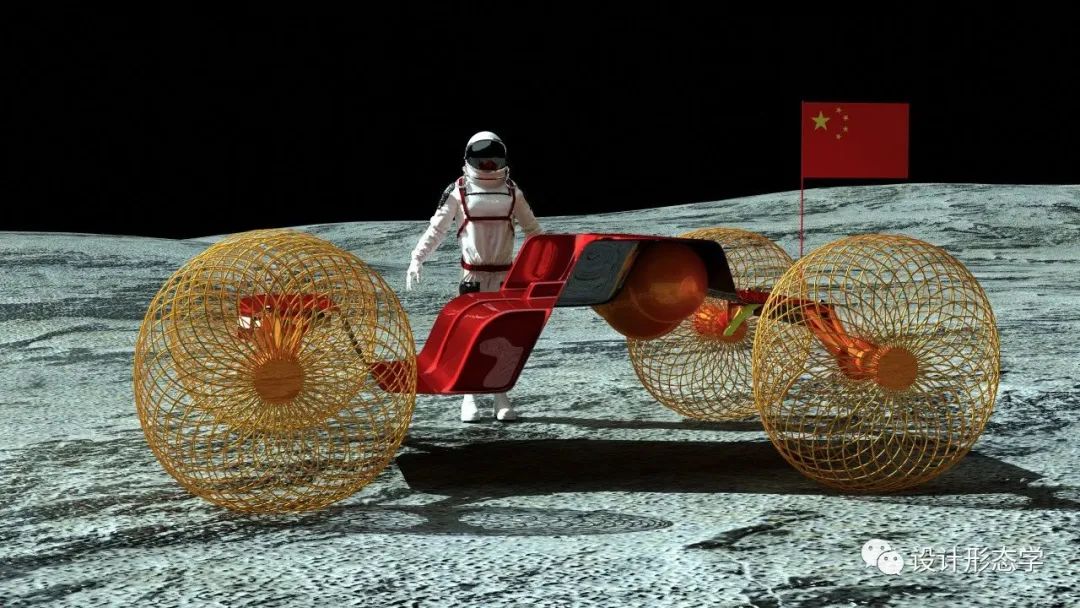
“哪吒”月球车设计方案
1. 轻-比阿波罗月球车轻49%-混天绫
“哪吒”月球车的金属材料支撑采用超低辐射率金涂层铝材,实现更小的热辐射率热胀冷缩。“哪吒”月球车的非金属材料车身采用月球纤维,通过HPRTM工艺构造,重量仅19kg,这种材料曾用在rocketlab的火箭箭体和bigelow的国际空间站柔性舱。国际实践中能够有效抵御宇宙射线和大温差考验。 “哪吒”月球车展开空间高达3.6米X2米,比阿波罗月球车(3米)长20%。能源采用再生燃料电池,比锂电池轻89%,重量仅为37kg。行驶,转向,变形,电控,减震集成在独立的角模块上,每个重量仅10kg,重量40kg。整车设计重量仅为96kg,比阿波罗月球车重量189kg轻49%。
2. 强-比阿波罗月球车越障能力提高66%-风火轮
“哪吒”月球车推出全球首个球形可变形轮胎,采用月球纤维球形缠绕技术成型,以镂空轮胎应对布满砾石的月球表面,同时通过张力控制实现轮胎的轮径变化和接触面积变化。配置400w电机,续航速度高达30km/h。其打开状态下轮胎直径可达1.5米,可以轻松跨越0.5米沟壑,比阿波罗月球车的0.3米越障能力提高66%。同时,该车也可以通过轮胎形变跨过0.3米地形凸起,比阿波罗月球车的0.2米越障提高33%。
3. 稳-比阿波罗月球车故障率下降50%-三头八臂
“哪吒”月球车创造性的采用四个动力,转向,变形,电控,减震五合一角模块,元件大幅度精简50%,一旦产生故障,可以在1分钟内实现快速拆换。车辆控制和变形通过直觉式手套实现。任何三个轮子损坏依然正常运作,确保航天员交通安全。
4. 远-比阿波罗月球车行驶里程提高151倍-灵珠子
“哪吒”月球车采用液氢液氧球形储罐配套2kw可再生燃料电池提供动力。可再生燃料电池既可以正运行作为燃料电池释放电力,也可以逆运行作为电解槽制氢储存电力,效率高达75%。球形储罐配置热声机将电解的氢气转为液氢,氧气转为液氧储存。“哪吒”月球车储能量超过530kwh,比阿波罗月球车储能(36V242ah8.7kwh)提高61倍。“哪吒”月球车可以实现月夜15天(360hr)超长续航。单次满电续航里程超过10000公里可以绕月球(直径3476.28km)一周。比阿波罗月球车续航67km高151倍。“哪吒”月球车自带4kw柔性光伏系统,实现月昼期间自动充电制氢制氧,更可以实现能源与氧气的永续供应。
“哪吒”月球车设计方案-俯视图
5. 控-比阿波罗月球车部署运行范围超过10倍-乾坤圈
“哪吒”月球车可以无人部署和运行。通过执行机构控制利用复合材料在1分钟内全自动弹开。远程可以单指令快速分布式部署,并且执行采矿、样本采集、地形勘测和保卫巡逻功能;该月球车具备基于纯视觉的无人驾驶控制和星空视觉导航能力,能够实现亚米级精确制导。
6. 氧-比阿波罗月球车安全-豹皮囊
“哪吒”月球车可以拓展为承压的实验室氧舱,供4名航天员居住3个月。使用预制的充气月球纤维空气膜法,通过辐射固化可拓展为气密实验室,通过燃料电池提供氧气。其可以实现1500mpa的结构强度和钢材的25倍比强度。同时,可以实现气密移动实验室无人值守和载人车同一平台。